Motor speed and position Controller.

This controls the speed and position of a standard tangent bar actuator as shown, these are usually used to steer satellite dishes. This picture shows the old tracker (Polar mounted) The new one uses two of them to steer my solar panels to track the sun in Az and El. This is better as in the summer the sun rotates in azimuth around 270 degrees the old polar system could barely manage 160 degrees and required constant manual adjust ment of it's inclination. The new one just does the damn job and I can forget it, and return to a life of minimum effort... as it was ment to be.

This new one uses a PIC18F252 which has 32K of Contiguous Program Memory (none of that paged crap) Built in USART ADC and PWM controllers all of which will be used. The motor speed is controlled using PWM techniques and speed feedback is obtained by shutting down the PWM for 2mS out 20mS and measuring the voltage generated by the motor in free run. This is then used to adjust the PWM to maintain the required speed and give good torque t low speeds. Positional information is derived by counting the pulses generated by the actuator.

A picture of the prototype hardware used to develop both the hardware and the bones of the software. It looks a mess at this stage but was actually taking on good shape.

The light direction sensor enables the controllers to know where the sun is in relation to its current pointing angle. This worked realy well under good sun conditions but failed dismaly under cloudy conditions. It found the brightest part of the sky, but not where the sun is. If I could have found a near infra red sensor it may have stood a chance. However I couldn't so it was scrapped. I went back to the tried and tested prediction of where the sun should be. Experimentation showed that as long asthe panels are better than +/-15 deg. from direct on to the sun you are getting > 95% of what you should from the panels. This system is better than +/- 4 Deg.

The old tracker used this to keep good time so it could predict roughly where the sun should be. It's also useful to know it's night time and not to bother looking for it too. This was concidered as a option on the new design but as the final device was to be connected serially to my main server I decided to use this link to keep the motor controller time correct, Although the MSF Clock is still implemented in software just not fitted.
Final Schematic of finished Controller (.pdf) Circuit Description
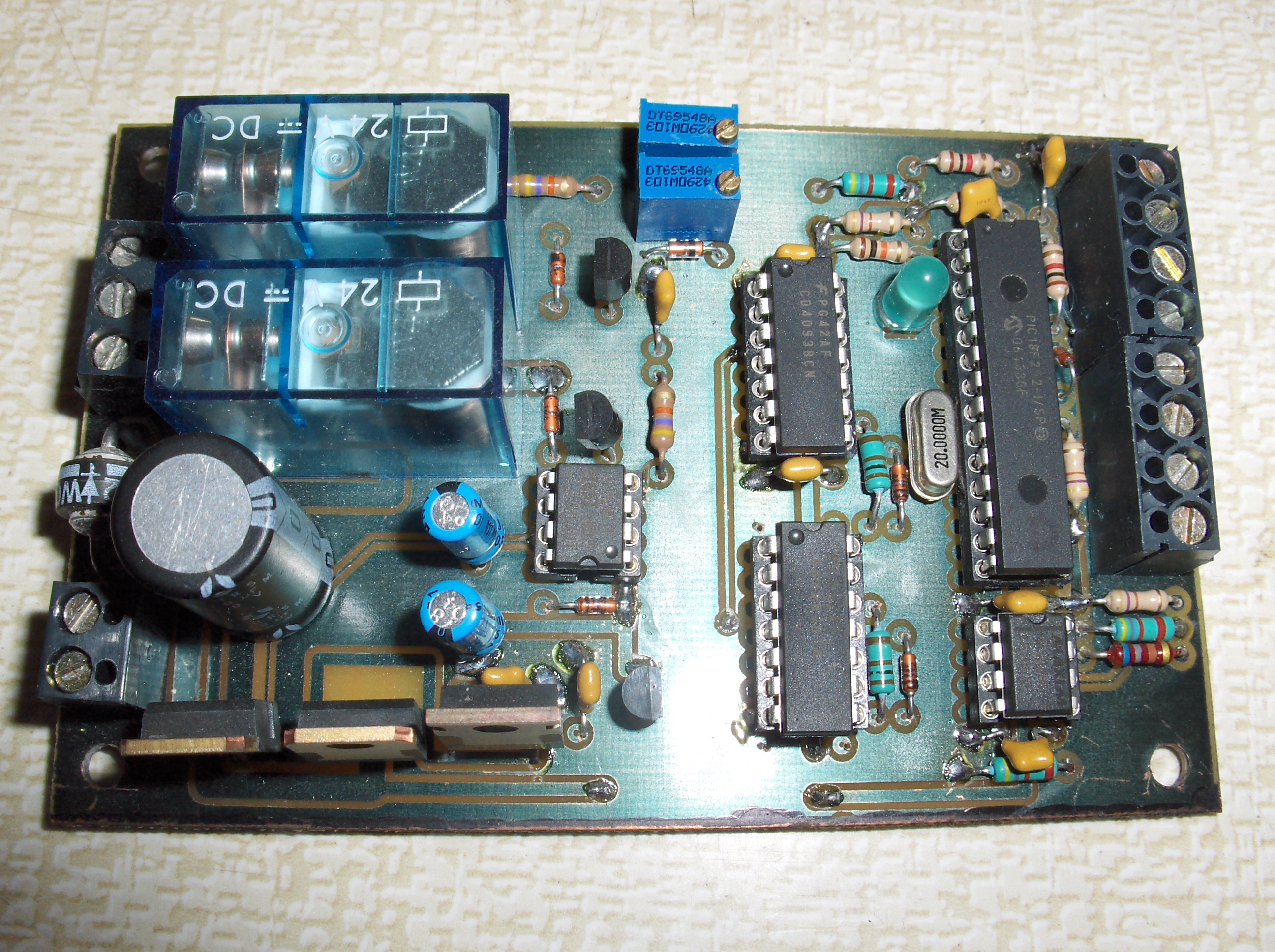
The actual Controller Finished PCB This is the spare (I made three)
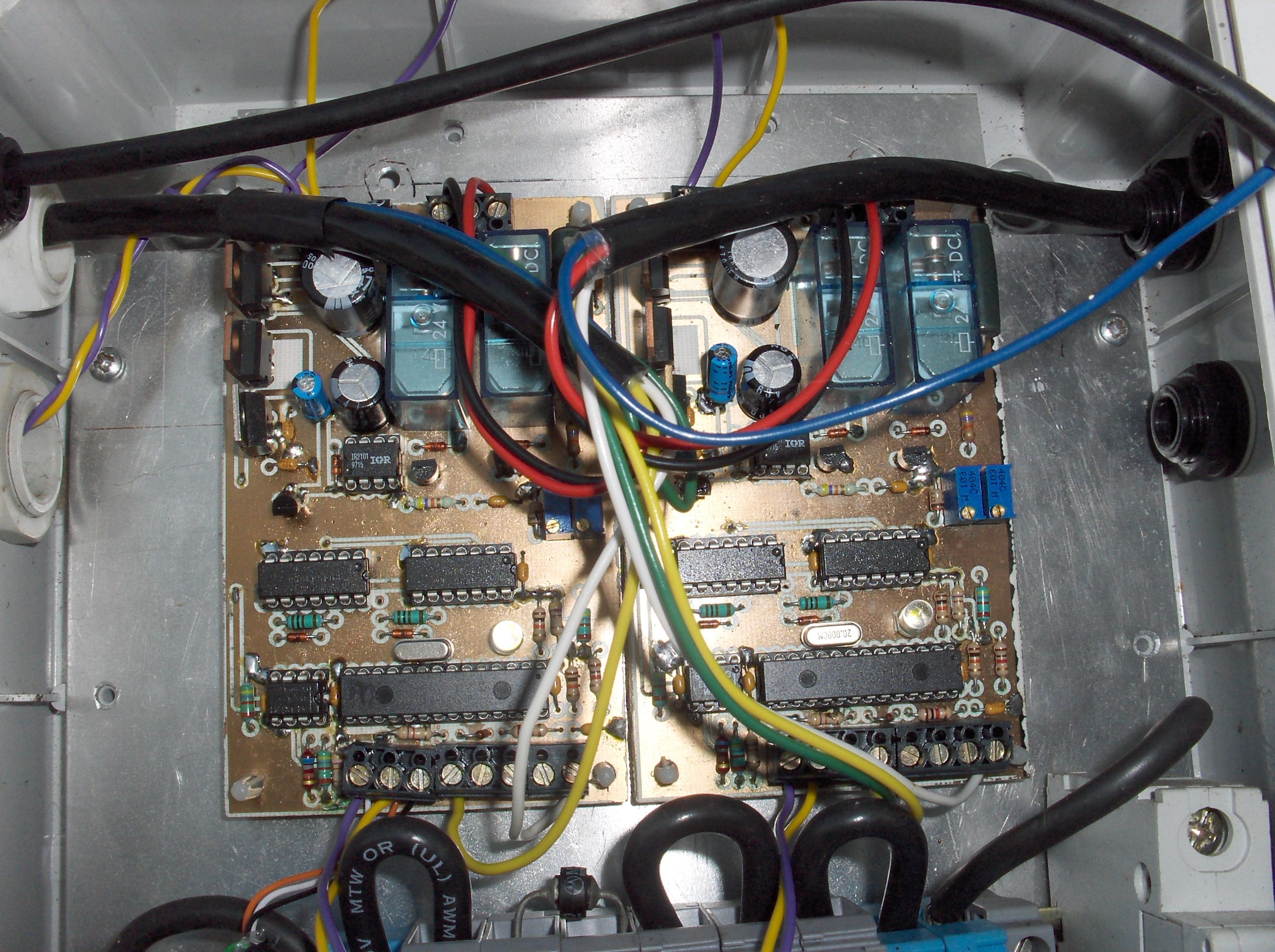
Two Controllers fitted on the Solar Panels in weather proof box

Solar panels tracking the sun. You may well ask "Why track?"